Solar-B微小擾乱対策 −回折限界望遠鏡、衛星内部振動との戦い-
1. はじめに
Solar-B可視光望遠鏡(SOT)は口径50cmの望遠鏡で太陽の回折限界像を取得することを目指している。高い空間分解能を達成するためには望遠鏡の優れた光学性能に加えて、露出中に画像がCCDの上で十分に安定していることが必要である。衛星の中には振動発生源がいくつもある。モメンタムホイール、慣性系基準装置(ジャイロ)、観測装置内のフィルターホイール等の稼動物である。(右図:クリックすると詳細ページへ) これらの擾乱が伝わって望遠鏡の主鏡や副鏡が振動するとCCD上の像が動いて得られる画像がぼける。これを十分に小さくすることが本当にできるかがSolar-B計画の当初より大き課題として認識された。
像を安定化するためにSOTは内部に可動鏡を持っており、 焦点面上の像位置検出器と閉ループを形成して能動的に像の安定化を図る仕組みになっているが、応答速度の限界から15Hzよりも早い像の動きを止めることができない。 したがって結局は1)稼動物の振動をできるだけ小さく抑える、2) 振動源から望遠鏡の鏡までの擾乱伝達をできるだけ小さくすることが必要なわけであるが、なにをどうすればよいのか定量的なことは最初誰にも分からなかった。像安定の目標はとりあえず0.06arcsec(3σ)(正弦波振動で0.028arcsec 0-pと等価)と定めた。(左図:像の振動と点像の劣化)
2. 機械環境試験モデルによる事前調査

このとき衛星にとり付いている各部品はまだ重量を本物と合わせたアルミのダミーである。ただし、望遠鏡を固定する衛星側の構造物(光学ベンチ)と可視光望遠鏡のトラス構造はすでにフライト品である。 これをつかって微小擾乱伝達率の測定がおこなわれた。方法は、ジャイロなどの稼動物のある位置に小型加振機をとりつけて振動を入力し、望遠鏡の主鏡と副鏡に取り付けた高感度加速度センサーで鏡の動きを測定してCCD上の像ずれ量の評価をおこなう、というものである。 加振機の発生する正弦波の周波数をスイープすることにより、最終的に像ずれ量(arcsec)/擾乱入力(N)という単位の「擾乱伝達率」を周波数の関数として求める。また、入力する擾乱として併進力だけではなく回転力(モーメント)の擾乱も見落としてはならないだろうとのことから、モーメント擾乱発生装置が三菱電機によって新たに開発され、試験に具された。
| 実際実験からは回転力が併進力と同程度に像の動きに寄与することがわかった。後は実験で得られた伝達率にその頃平行して評価が進められていた各稼動物の発生擾乱スペクトルを掛け合わせることにより、実際の望遠鏡の像ぶれ量を見積もることができる。 | 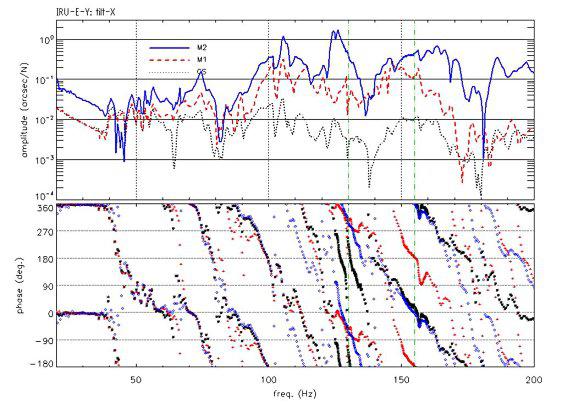 |
||||
|
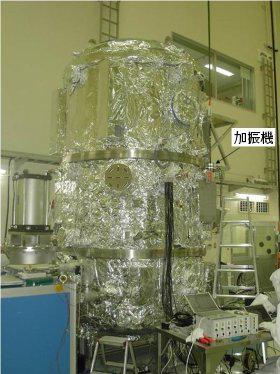
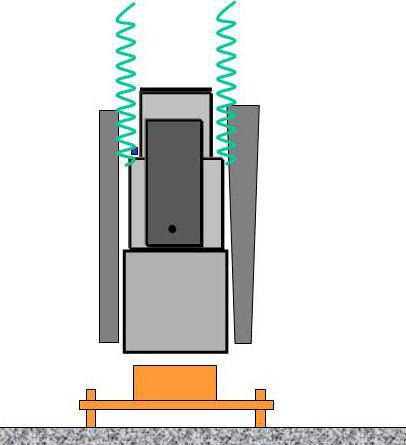
微小擾乱伝達率の測定は三菱電機鎌倉製作所の音響試験室で行われた。試験中衛星全体は建物からの環境擾乱を遮断するため4つの大きなバネによってクレーンで吊り上げられ、部屋の空調もすべて停止した状態で測定が行われた。(左上写真: 擾乱伝達率測定) 振動の入力位置と方向をひとつずつを変えていきながら加速度データを取得し、試験は約1週間にわたっておこなわれた。
|
 |
||||
測定からは以下の重大な結果が得られた。 (右図: 擾乱伝達率(上)、 モメンタムホイールの擾乱(中), モメンタムホイールによる画像のずれ(下)
|
 |
3. フライトモデルの1次噛み合わせにおける測定
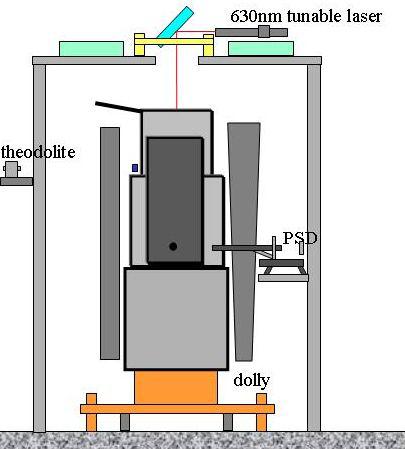

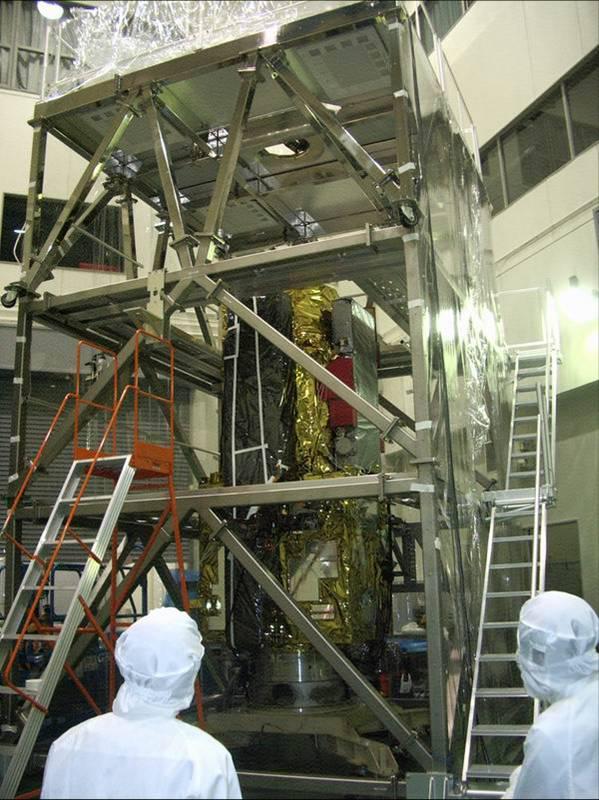
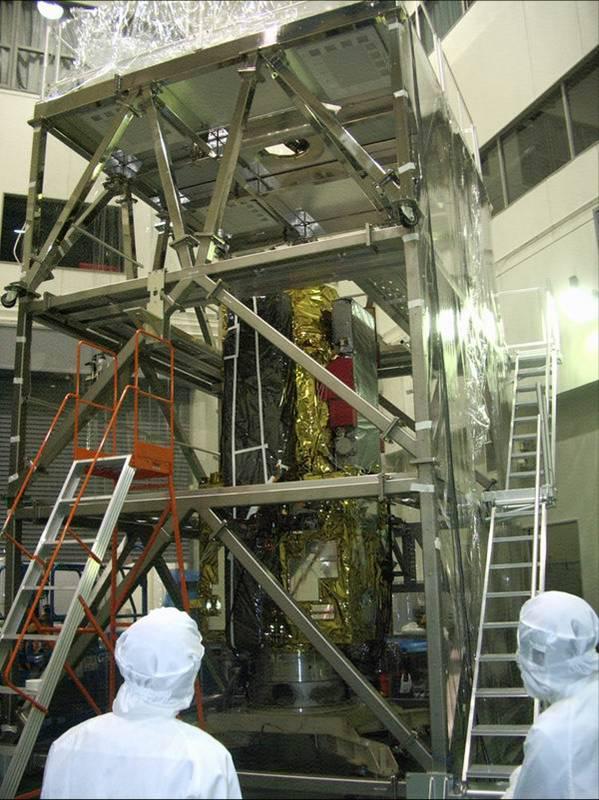
試験は宇宙研のクリンルームで行われ、 衛星バネ吊り状態で加速度センサーによる測定に3日、衛星床おきで光による測定に3日を費やしてデータを取得した。(左図上は模式図 下は測定風景) 光による測定は衛星を堅牢なタワーの中に設置し、タワーの上からコリメートしたレーザー光を望遠鏡に入れ
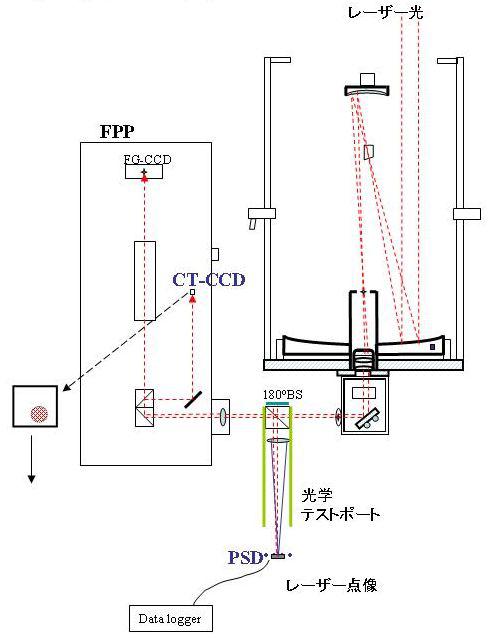
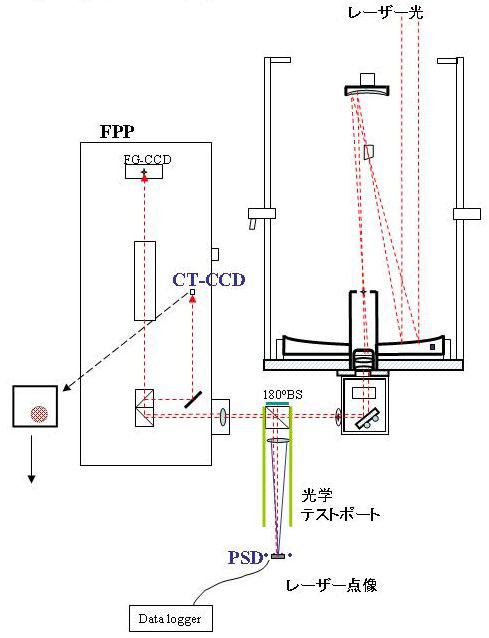
、焦点面検出装置(FPP)にある像位置検出カメラ(580Hz)と、望遠鏡とFPPの間に設けられたテストポートから光を外に取り出し、位置検出センサーでレーザー光の点像の動きを測定するものである。モメンタムホイールやIRU、観測機器内のメカニズムを順次動かしながらデータを取得した。(右図:光学測定の方法)
詳しい解析により2つの測定方法はほぼ同じ結果を与えることを確認した。但し光学測定による方法は、望遠鏡の主鏡と副鏡以外に折り曲げ鏡等の振動の影響も加わるため、加速度センサーによる結果よりも若干大きめの像の動きを示す与えるケースもある。以下の結果が得られた。
  |
|
  |
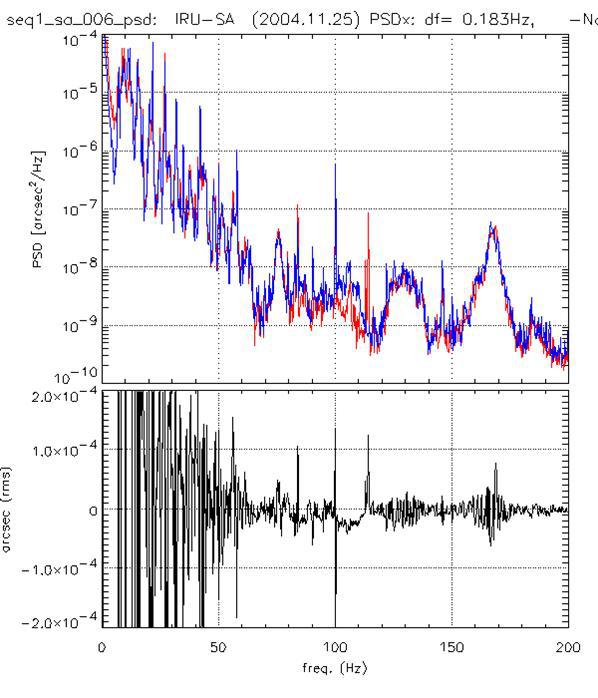
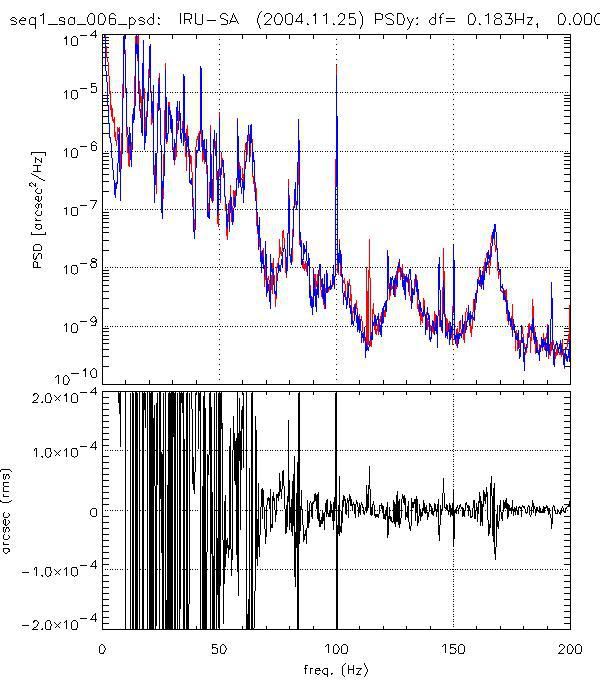
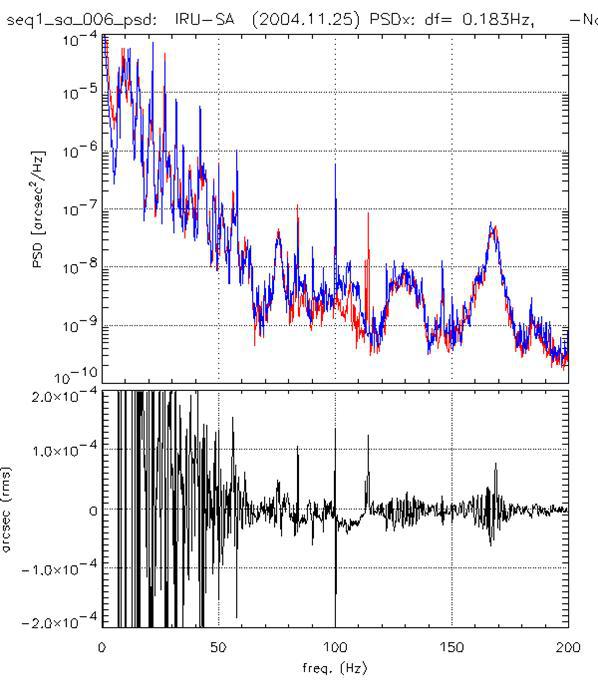
- IRU-Aによる像擾乱がこれまでの実験結果から予測される大きさと比べて約1/30と非常に小さい。(上図上:IRU-Aの擾乱)
- モメンタムホイール、IRU-Bについてはこれまでの実験結果をほぼ再現しており許容範囲の擾乱レベルである。
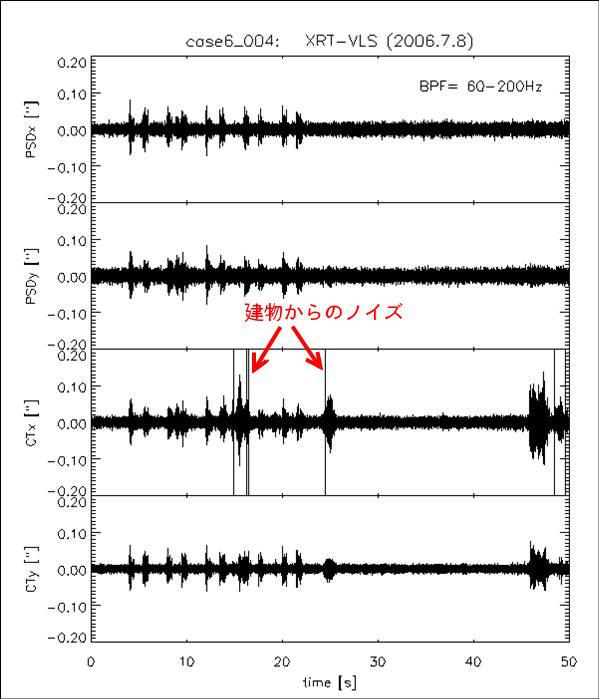
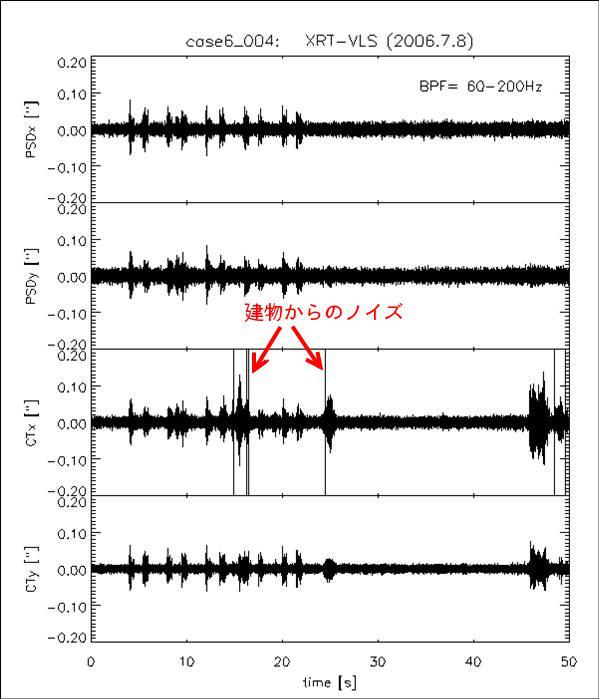
- XRTの持つ可視光シャッタが駆動中は許容値を大きく越える像擾乱が発生する。 (上図下:望遠鏡稼動メカニズムによる像擾乱)
- 他の望遠鏡のメカニズムについては、像擾乱が測定に掛かるものもあるがすべて許容値内である。
XRTの可視光シャッターは1次噛み合わせ時にはまだ最終的なバランス調整が行われておらず、また使用頻度が他のものと比べて高くないことから、SOTの露出タイミングを調整するためのソフトウェアの改修は行わないことにした。
4. フライト実機による検証実験
- XRT-可視光シャッタはこれまでと同様許容値を越えている。
- その他のメカニズムの擾乱は大きな変化は見られず許容範囲にある。 (一番大騒ぎしたIRU-Aは結果として非常に低い擾乱レベルに安定している。 回転数を変えてバスへ移動したことが功を奏した。。)
2006.9.11記
国立天文台 SOLAR-B 推進室 一本 潔
Solar-B微小擾乱対策
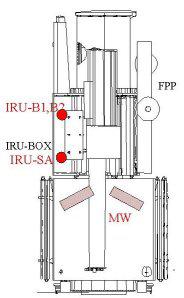
Solar-Bの中にある稼動物
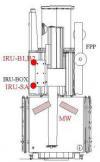 |
衛星の中には振動源となる稼動物がいくつもある。モメンタムホイール(MW 4台)、慣性 系基準装置(ジャイロ:IRU-A, IRU-B)、観測装置内の稼動メカニズムである。 これらの機械擾乱が伝わって望遠鏡の主鏡や副鏡が振動するとCCD上の像が露出中に動き 、解像度の高い画像が得られなくなる |
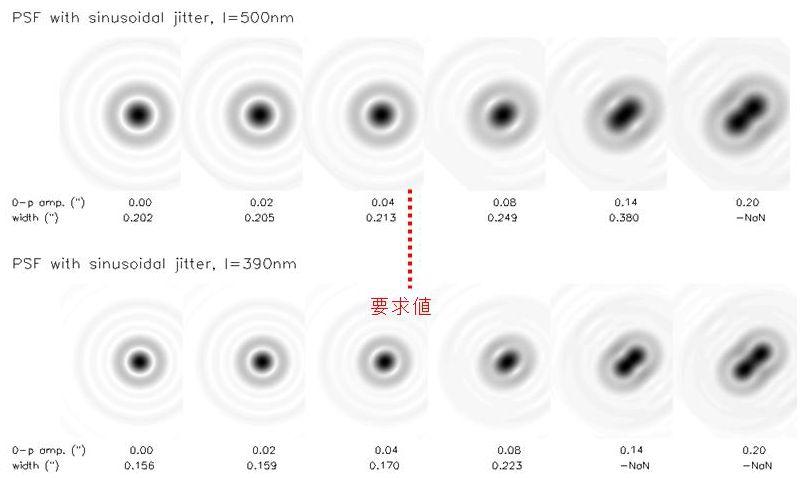
像の振動と点像の劣化
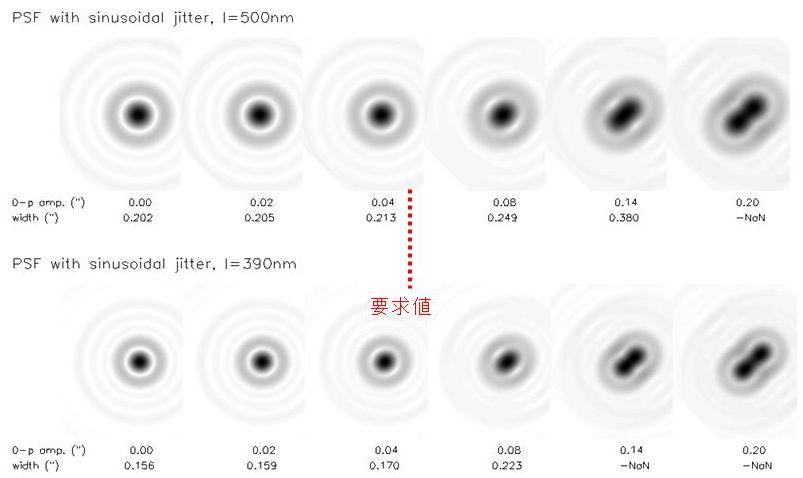
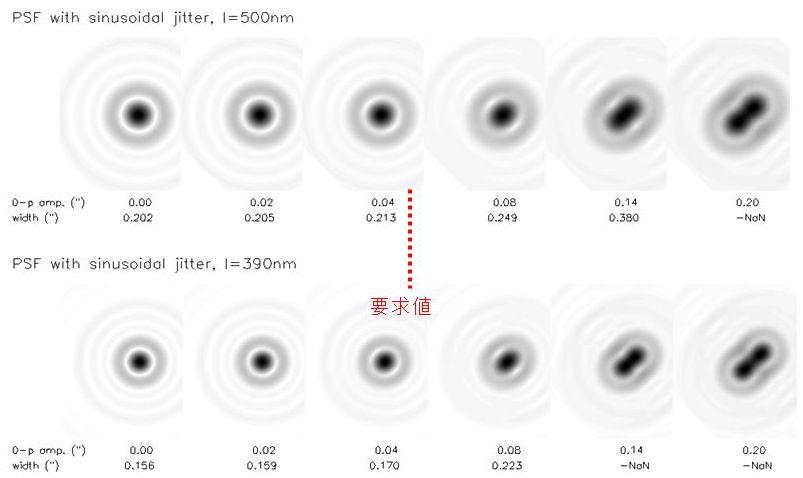
画像が1方向に正弦波的に振動したときの回折限界点像(上:500nm, 下:390nm)。 像安定度の要求レベルは最初0.06"(3s) = 0.028"(0-p) と定めたが、実験を行ううちに 大変であることが分かり0.09"(3s) = 0.042"(0-p) に緩和した。
機械環境試験モデルによる擾乱伝達率測定
 |
 |
| 副鏡裏に貼られた高感度加速度センサー | |
|
ジャイロなどの稼動物の位置に小型加振機をとりつけて振動を入力し、望遠鏡の主鏡と副鏡に貼りつけた高感度加速度センサーで鏡の動きを測定してCCD上の像ずれ量の評価をおこなう。 |
|
| ばねで吊られた衛星機械環境試験モデル 2002.7 |
擾乱伝達率
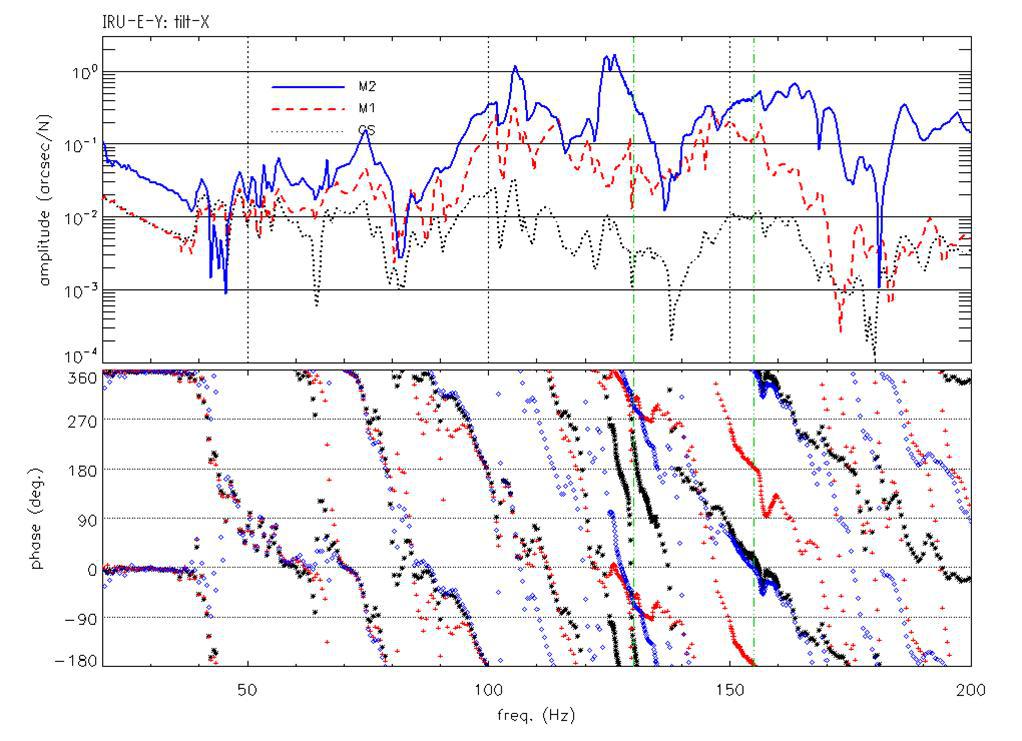 |
|
IRU-Aの位置から望遠鏡の鏡の回転振動に対する擾乱伝達率(上)。衛星のMTM試験モデル による。125Hz付近に副鏡への伝達率(青線)にピークがあり、130Hzの擾乱を出すIRU -Aは大きな像ずれを引き起こすことがわかった。この結果からIRU-Aの搭載位置を望遠鏡 と同じ架台から衛星バス部へ移し、発生擾乱の周波数が114HzになるようIRU-Aの回転数を 変更することにした。 |
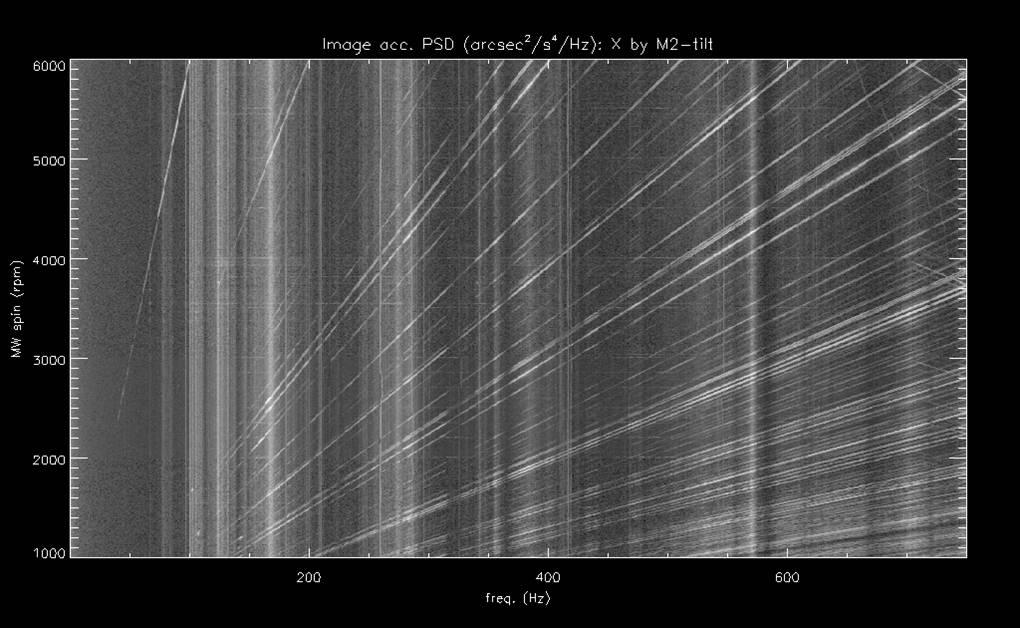
モメンタムホイールの擾乱
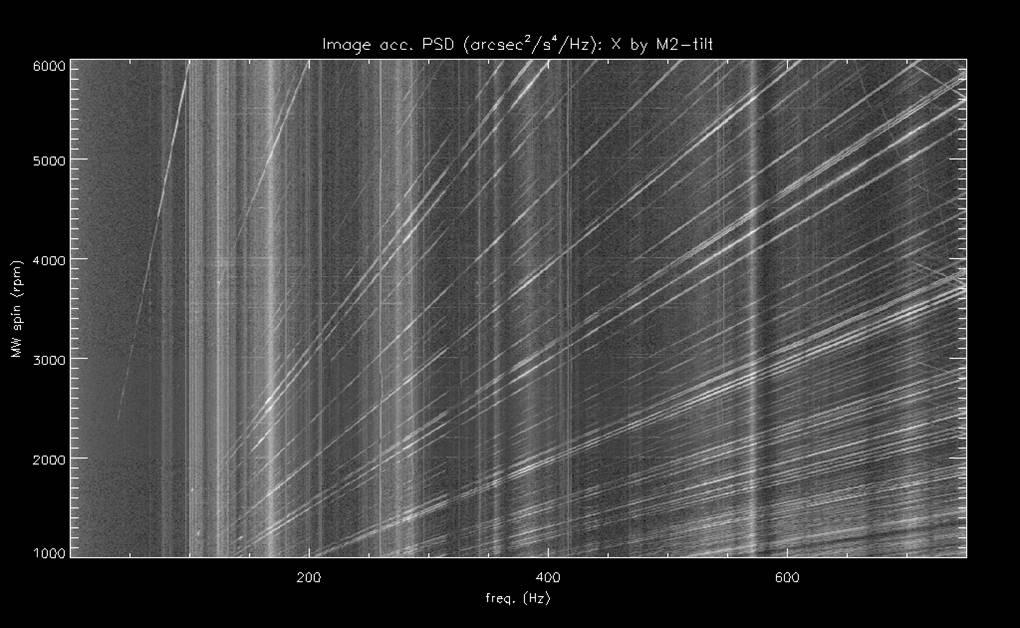 |
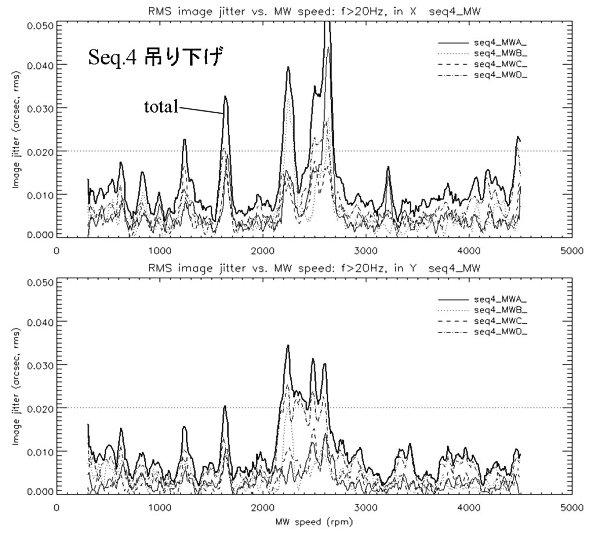
モメンタムホイールの回転による画像ジッターのスペクトル。横軸は画像ジッターの周波 数、縦軸はモメンタムホイールの回転数。明るい筋はホイールの回転数に応じて多数の擾 乱ピークが生じていることを表す。
モメンタムホイールによる画像のずれ
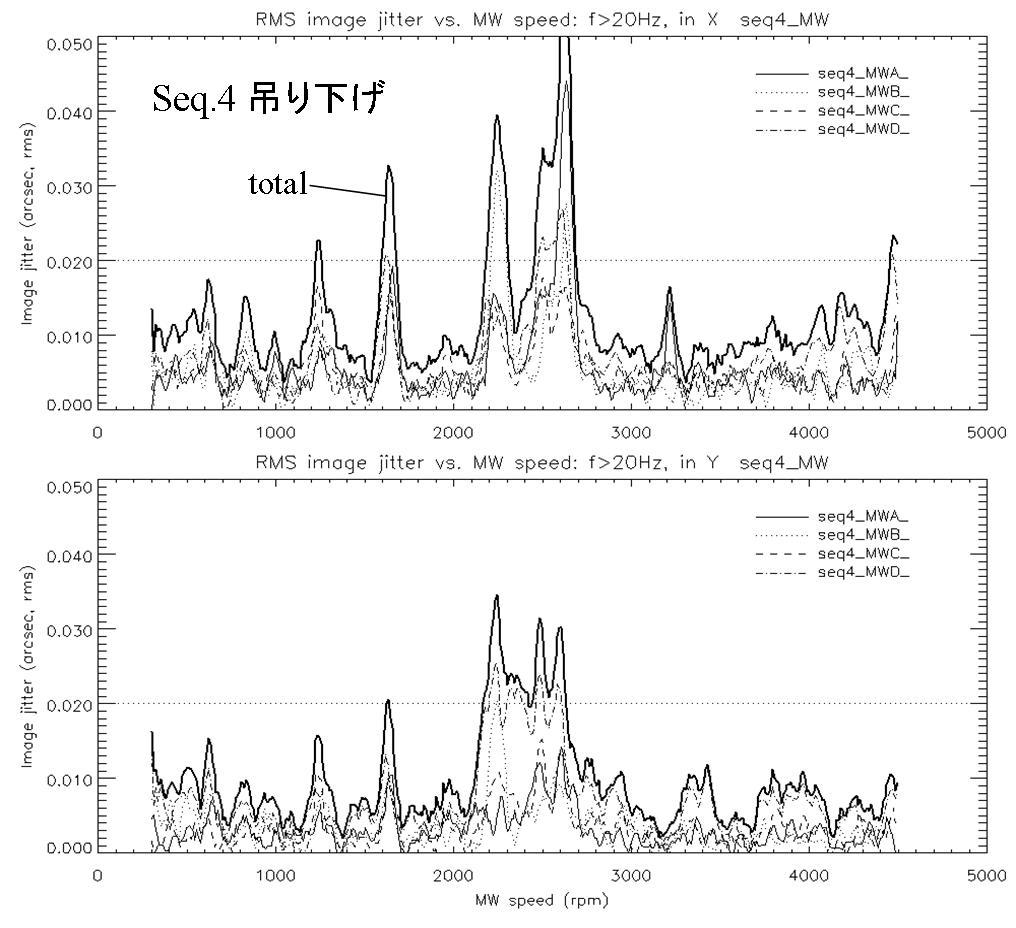
| モメンタムホイールによる画像のずれ。周波数方向に積分した画像の動きをホイールの回 転数にたいしてプロットしてある。ホイールの回転数に応じて像擾乱が大きくなったり小 さくなったりしているがわかる。運用上の回転数として1800±100rpmが選ばれた。横線は 像安定要求レベルである。1次噛み合わせ(2004年)時の加速度データより。 |
真空擾乱試験 2003.6
 |
副鏡や主鏡が振動する振幅は、構造の減衰率に大きく依存している。微小擾乱測定は空気 中で行ったが、空気の存在による振動の減衰も無視することができない。もしこれが効い ていると、地上の試験で擾乱が小さくても宇宙に上がった後に思わぬ像擾乱に見舞われる ことになる。そこで、可視光望遠鏡を国立天文台の真空チャンバーに入れて外部から加振 機で振動を入力し、空気中と真空中での鏡の振動を測定比較した。結果は幸い空気の存在 は問題となる周波数においては影響ないというものであった。 |
2つの擾乱測定方法
加速度センサーによる擾乱測定は望遠鏡の主鏡と副鏡の振動だけを測るものである。また 、最終フライト望遠鏡には加速度センサーをつけられないため、1次噛み合わせ試験(20 04年11月)では光による測定も平行しておこなった。またこのとき初めて稼動物のフライ ト品による測定が行われた。
| 衛星バネ吊り状態で加速度センサーによる測定 | 衛星床おきで光による測定 |
 |
 |
2つの擾乱測定方法 1次噛み合わせ試験(2004.11)
 |
 |
|
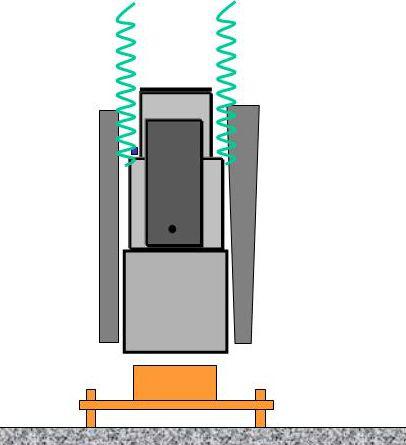
衛星をバネで吊り上げ、望遠鏡の鏡に取り付けた加速度センサーで擾乱を測定する。 |
光学測定の方法衛星を頑丈なタワーの中に置き、光を望遠鏡に入れて画像から擾乱を測定する。 |
光学測定の方法
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
IRU-Aの擾乱
 |
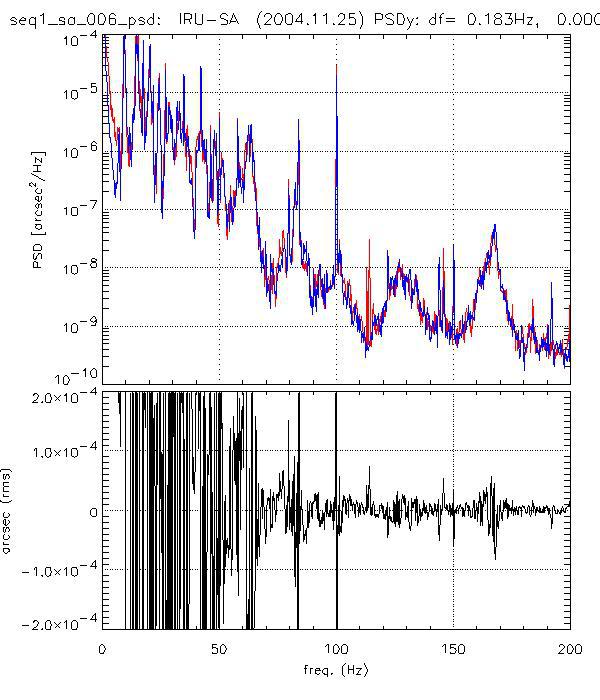 |
| IRU-Aの回転による画像ジッターのスペクトル(赤がIRU回転時、青がIRU停止時のバック グラウンド)。1次噛み合わせ試験より。114Hzにある小さなピークがIRU-Aによる擾乱で ある。機械環境試験モデルによる実験結果からの予測よりも大幅に小さい擾乱レベルが観 測された。 | |
{kind=link}
{kind=link}
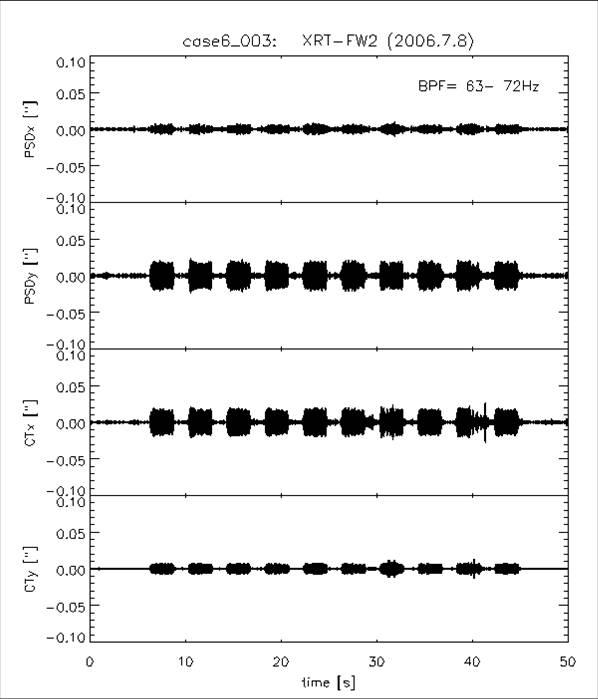
望遠鏡稼動メカニズムによる像擾乱
| XRT可視光シャッターによる擾乱 | XRTフィルターホイール-2による擾乱 |
 |
|
| 望遠鏡内のメカニズムを5回往復運動させたときのテストポートの光位置センサー(PSD )及び像位置検出カメラ(CT)による像の動き。XRTの可視光シャッターは許容値を2倍ほ ど上回る像擾乱を発生している。その他のメカニズムについては許容レベル以下であるこ とが確かめられた。最終フライト実機による測定。 | |
{kind=link}
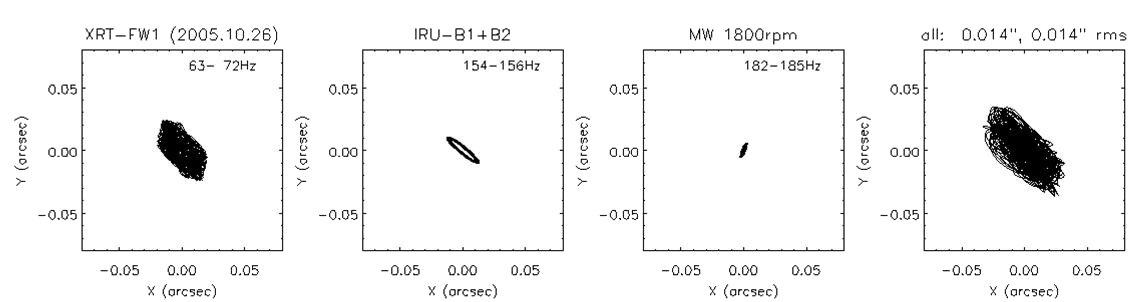
稼動物による焦点面上の像の動き。
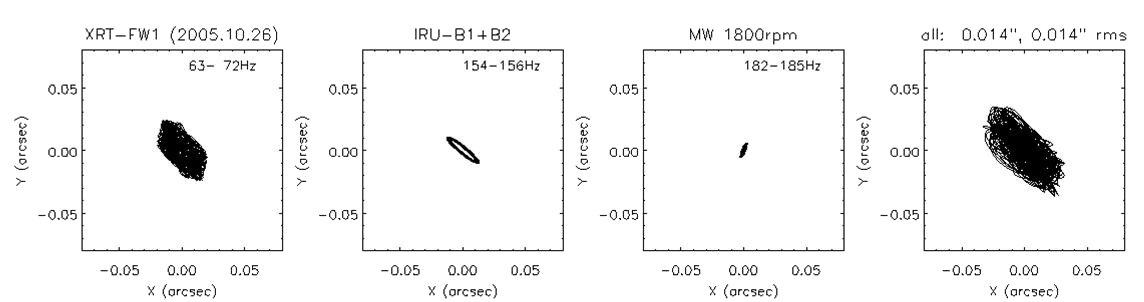 |
| XRTフィルターホイールとIRU-B1,B2 とモメンタムホイールを同時に動かしても画像の動きは許容値に収まっている。 |
{kind=link}
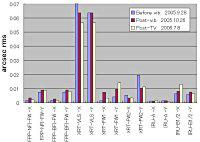
最終フライトモデルによる擾乱測定結果
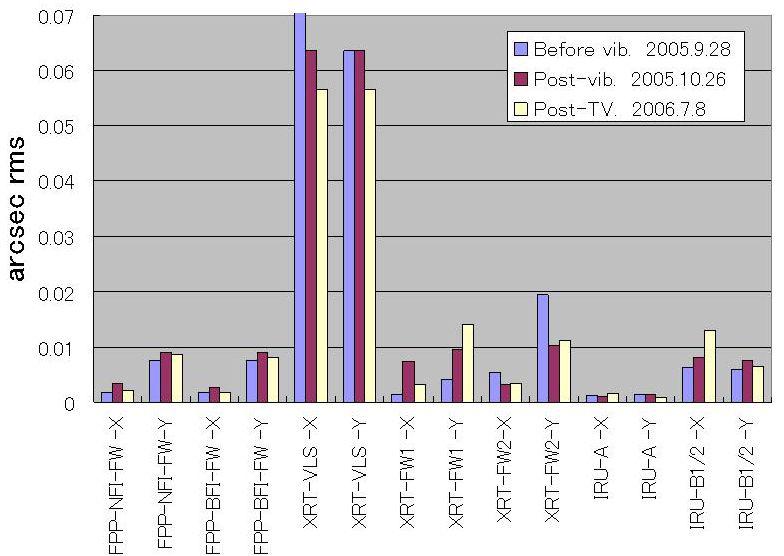 |
| 主な稼動メカニズムについて総合試験における3回の測定結果を並べて表示してある。要求レベル(0.03"rms)を超えているのはXRT-VLS(可視光シャッタ)のみである。XRT-VLSについては使用頻度を低く抑える(1時間に1回程度)ことで観測への影響を回避する |
{kind=link}
当ページの画像、映像のご利用については、こちらをご覧ください。当ページの画像、映像でクレジットが明記されていないもののクレジットは『国立天文台/JAXA』です。当ページ内の、クレジットが『国立天文台/JAXA』、『国立天文台/JAXA/MSU』および『国立天文台、JAXA、NASA/MSFC』である著作物については、国立天文台が単独で著作権を有する著作物の利用条件と同様とします。著作物のご利用にあたっては、クレジットの記載をお願いいたします。なお、報道機関、出版物におけるご利用の場合には、ご利用になった旨を事後でも結構ですのでご連絡いただけますと幸いです。ご連絡はsolar_helpdesk(at)ml.nao.ac.jp((at)は@に置き換えてください)にお願いいたします。